(BALIZA INTELIGENTE)
Según la definición extraída de http://www.aprs.net.au/vhf/what-smart-beaconing/ adaptada para mejor comprensión en chile, SmartBeaconing™ es un algoritmo desarrollado por los creadores de HamHUD.net para elegir dinámicamente cuándo y/o con qué frecuencia enviar actualizaciones de posición.
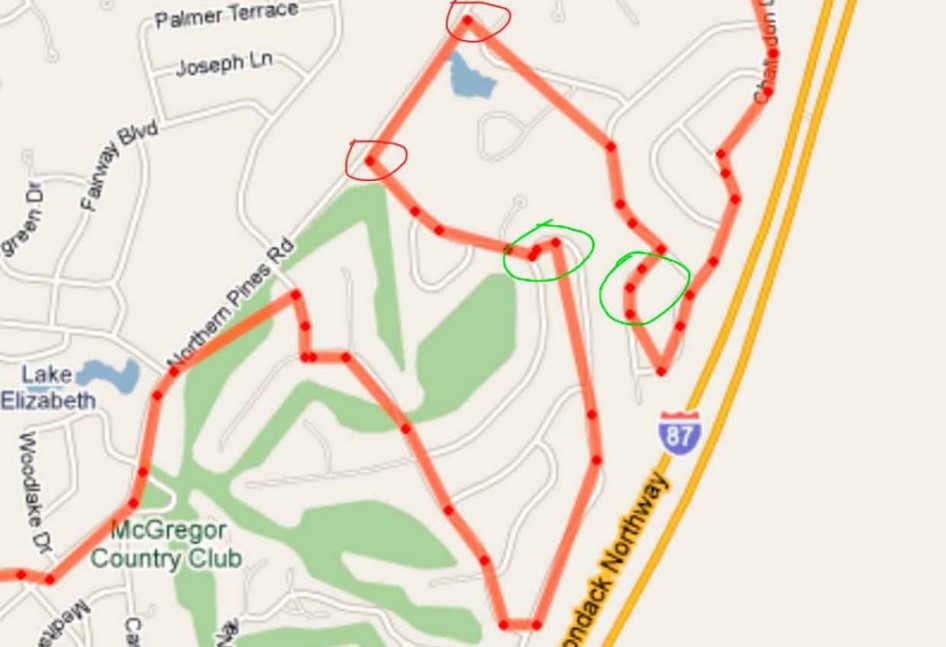
El objetivo principal de SmartBeaconing es enviar balizas solo cuando haya cambios considerables en un desplazamiento. Minimiza la cantidad de beacons transmitida y, al mismo tiempo, maximiza el valor de lo que se transmite, al ser información realmente útil.
En resumen, cuanto más rápido se mueva, con más frecuencia enviará datos de posición. También sabe enviar actualizaciones de posición cuando cambias de dirección significativamente. Si estas estacionario o tu desplazamiento en pobre, las balizas se emiten con mucho menos frecuencia.
En la imagen, esta la descripción de los parámetros de configuración de SmartBeaconing, los cuales son seteados en vuestro equipo de radio portátil o movil, con capacidades APRS.
SmartBeaconing activado es mucho mejor que enviar una baliza permanente cada «x» segundos o minutos, que no cesara cuando este inmóvil y que no se hará mas ágil, cuando alcance grandes velocidades, ni se activara cuando este efectuando giros.
Podrá economizar batería, ya que SmartBeaconing transmite solo cuando es necesario, no permanentemente.
Sus trazas serán mucho mas precisas
Si cuenta en su equipo con SmartBeaconing, no use beacons regulares.
Analicemos un poco mas en detalle los efecto de cada parámetro:
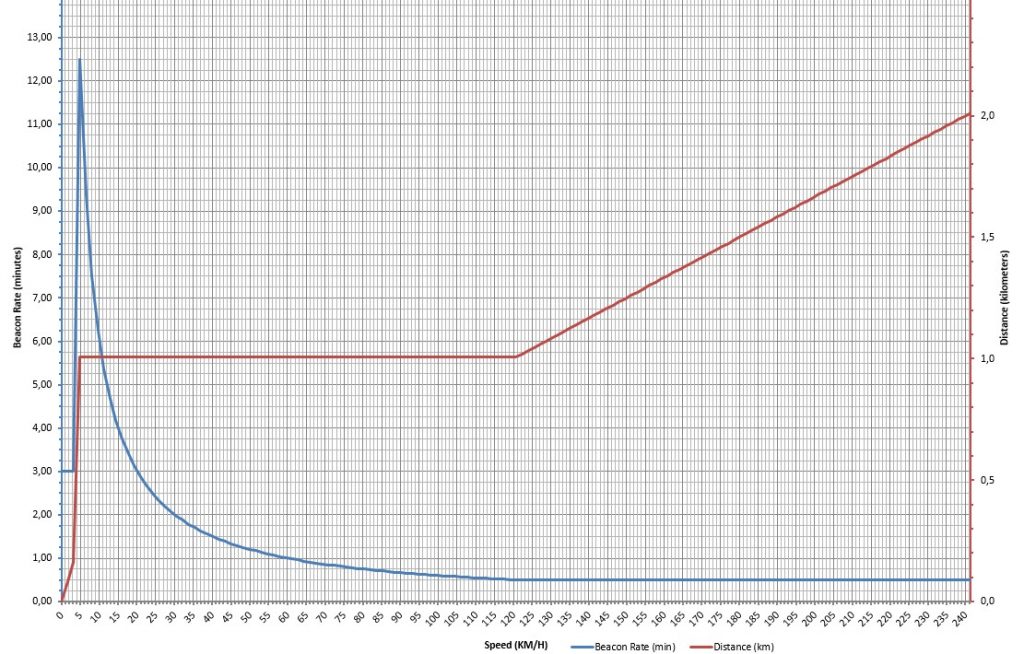
SLOW SPEED Y FAST SPEED: La frecuencia de emisión de las balizas es lineal con la velocidad de desplazamiento; si va viajando rápido, las balizas serán mas frecuentes; si va viajando lento, las balizas serán menos frecuentes. Esto sucede mientras se desplace a velocidades que este dentro de los rangos definidos en SLOW SPEED y FAST SPEED
SLOW RATE Y FAST RATE: si esta detenido o se desplaza a menor velocidad que lo definido en SLOW SPEED, las balizas pasaran a emitirse de manera estática, al intervalo definido como SLOW RATE; si va mas rápido que el umbral FAST SPEED, las balizas serán emitidas según el intervalo definido en FAST RATE.
MIN TURN TIME, MIN TURN ANGLE y TURN SLOPE: los cambios de rumbo (dirección/sentido), serán consignados según haya definido los parámetros MIN TURN TIME, MIN TURN ANGLE y TURN SLOPE; no pretenda mejorar sus cambios de rumbo modificando los parámetros SLOW SPEED/RATE y FAST SPEED/RATE, ya que estos solo incrementaran emisión de balizas, no mejoras en su trazabilidad.
MIN TURN TIME: cuando enfrenta varios cambios de rumbo consecutivos, uno tras otro, la emisión de balizas será mas frecuente, sin embargo, no debe ser inmediatamente consecutiva, lo que crea saturación de canal y muy probablemente, ni sus propias balizas puedan ingresar a la red, por estar la misma ocupada retransmitiendo sus balizas anteriores; para ello se establece el parámetro MIN TURN TIME, que define el tiempo mínimo entre balizas, así, por mucho que el gps le indique a su equipo que ha detectado cambios de rumbos, el equipo no emitirá beacon, hasta que se haya cumplido el tiempo entre balizas definido.
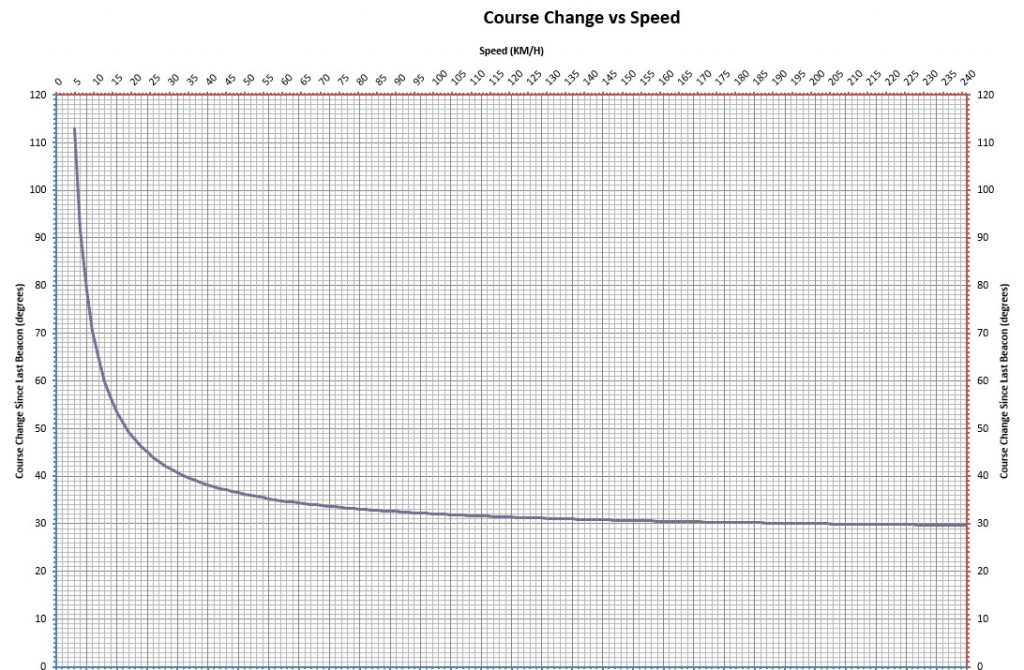
MIN TURN ANGLE: En un trayecto puede tener cambios de rumbo leves (curvas, contra-curvas), o cambios de rumbo mas cerrados (calles, pasajes), que detectados por el GPS, serán informados al equipo aprs en formato de grados. Todo cambio de rumbo superior a los grados definidos en MIN TURN ANGLE, causara la transmisión de un beacon, pero según la velocidad de su desplazamiento, esta emisión podría verse alterada por el parámetro TURN SLOPE. Solo con la interacción de estos 2 parámetros, podrá obtener trazas eficientes, tanto para cambios de rumbo leves, como agudos o mas cerrados, según la velocidad de su desplazamiento, ya que no es lo mismo un cambio de carril de 15° a 5KM/h (que seria irrelevante consignar), que un cambio de rumbo de 15° a 80KM/h en autopista (propio de una curva prominente). Nuevamente, la idea no es abusar de los parámetros, para que emitan balizas con el mas mínimo cambio de sentido, lo que seria absurdo y dañino para la red, sino mas bien sea una emisión controlada, que permita trazas eficientes.
TURN SLOPE: es un parámetro difícil de entender, porque no se trata de unidades de tiempo, grados, ni km/h, sino un «Valor», que dividido por la velocidad de desplazamiento, su resultado incrementara el ángulo definido en MIN TURN ANGLE, para definir la conveniencia de emitir un beacon.
En combinación con MIN TURN ANGLE, TURN SLOPE permite que tanto los cambios de rumbo a baja velocidad, como a alta velocidad, sean reflejados adecuada y oportunamente. La idea del parámetro TURN SLOPE, es modificar el ángulo mínimo de giro sobre el cual se emitirá una baliza, conforme varíe la velocidad de desplazamiento. Como ejemplo de su eficacia, considere un ángulo mínimo de giro de solo 15″ para MIN TURN ANGLE, viajando a velocidad urbana inferior a 40KM/h, lo que inevitablemente, generaría balizas por cada cambio de carril que efectuara; para evitar esto, TURN SLOPE agrega «X» grados adicionales a MIN TURN ANGLE, de modo que el ángulo de giro mínimo para emitir un beacon, sea mayor que el establecido, evitando así, emitir balizas para cada cambio de carril. Todo dependerá por supuesto, de su velocidad de desplazamiento. Así mismo, si su velocidad de desplazamiento fuera alta, TURN SLOPE no modificaría en gran medida su parámetro MIN TURN ANGLE, permitiendo la emisión del beacon, prácticamente al valor de ángulo mínimo ya definido.
supongamos que seteamos los siguientes parámetros:
- slow speed: 5 km/h
- slow rate: 180 seg
- fast speed: 120 km/h
- fast rate: 30 seg
- min turn angle: 28 grados
- turn slope: 255
Los parámetros dados en el ejemplo, son aptos para un desplazamiento en vehículo, por tanto deberá adaptar las velocidades FAST SPEED y SLOW SPEED según su caso.
En general, conforme mas lento sea su medio de transporte, mas lenta debiera ser la emisión de sus beacon, ajustando los parámetros SLOW RATE y FAST RATE, con cifras mayores.
Para efectos de mejorar la trazabilidad de sus cambios de rumbo, es recomendable jugar con el MIN TURN ANGLE, aunque mayormente con el TURN SLOPE.
Éxito y a experimentar!
Deja una respuesta